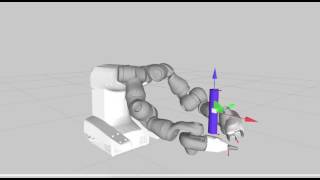
Media Summary: YuMi running through a series of motions using the cognizant control software from Lula Robotics, demonstrating its range of ... We first showed you Ford's commitment to "intelligent" vehicles that talk to one another to avoid accidents (Vehicle-to-Vehicle or ... Welcome to Epic Flight Academy's Maneuvers Series. In this series, we are focusing on specific maneuvers pilots must be able to ...
Self Collision Avoidance Demo - Detailed Analysis & Overview
YuMi running through a series of motions using the cognizant control software from Lula Robotics, demonstrating its range of ... We first showed you Ford's commitment to "intelligent" vehicles that talk to one another to avoid accidents (Vehicle-to-Vehicle or ... Welcome to Epic Flight Academy's Maneuvers Series. In this series, we are focusing on specific maneuvers pilots must be able to ... This work uses vector field inequalities (VFI) to prevent robot This video demonstrates the real-time robot path planning in action for dynamic The University of Texas at Austin demonstrates how autonomous inspection drones can
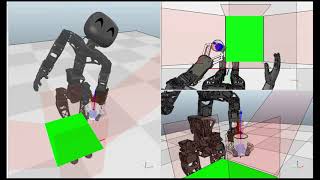
The video illustrates the effectiveness of the proposed control laws based on first and second-order Vector Field Inequalities. Visual Scanning and Collision Avoidance CFI ground AVIA 410 Presentation Real-Time Self-Collision Avoidance in Joint Space for Humanoid Robots Energid Technologies demonstrating multi-robot active In this work, we propose a data-driven approach for real-time