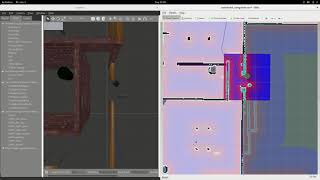
Media Summary: This video presents an optimal trajectory MPPI, Log-MPPI, TEB, DWA and PRIEST on dynamic environments Compiled ROS melody on a Raspberry PI3 (took one day) and quickly tried out 'teb_local_planner' on it...
Teb Local Planner Testing - Detailed Analysis & Overview
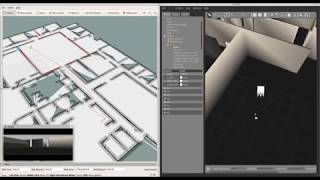
This video presents an optimal trajectory MPPI, Log-MPPI, TEB, DWA and PRIEST on dynamic environments Compiled ROS melody on a Raspberry PI3 (took one day) and quickly tried out 'teb_local_planner' on it... Work performed at: More technical info about this ROS Static obstacle avoidance with teb local planner [ROS NAVIGATION STACK] This video is part of a series of videos for my Final Year Project Dissertation. The algorithm shown here is the A* Global
Autonomous Guided Vehicle amcl g global l eband- Navigation Stack Experiment.












![Static obstacle avoidance with teb local planner [ROS | NAVIGATION STACK]](https://i.ytimg.com/vi/OfwtsQExnkw/mqdefault.jpg)