Media Summary: Discover how you can autonomously navigate your vehicle Video presentation of: J. Liu, H. Zhu and J. Alonso-Mora, "Robust In this work, we study the effects that perception latency has on the maximum speed a robot can reach to safely navigate
Vision Based Obstacle Avoidance Using - Detailed Analysis & Overview
Discover how you can autonomously navigate your vehicle Video presentation of: J. Liu, H. Zhu and J. Alonso-Mora, "Robust In this work, we study the effects that perception latency has on the maximum speed a robot can reach to safely navigate This fully autonomous drone has an onboard computer 'brain', camera 'eyes', and an algorithm that generates the fastest path ... Senior Design Project by Emily Hernandez, Alex Domagala, Pranay Singh, and Jon Perthel Electrical and Computer Engineering, ... Nikolaj Witting, Fidel Esquivel Estay, Johannes Lienhart, and Paula Wulkop from ETH Zurich implement dynamic
The robot tries to follow a straight line from the starting position (without road Project video prepared to be presented at the Mechanical Exhibition 2015. Get your free Elektor subscription here: Coupon code: ... This project contains: -Quadrotor modeling -Control - Master thesis by Samuel Karlsson This thesis looks into collisions By extracting the color information given by the camera, the vehicle distinguishes between an
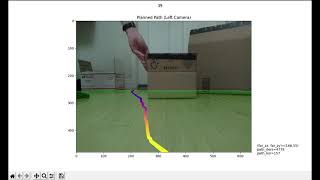
Stereo Camera Autonomous Navigation: Obstacle Avoidance & Path-Planning