Media Summary: This video talks about the conceptual differences between Visual Odometry and Supporting video for the public repository of ROS package cmr_lidarloop ( 2021, ... Using ORB SLAM2 from link with some modifications.
Visual Slam Algorithm With Loop - Detailed Analysis & Overview
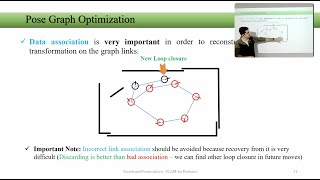
This video talks about the conceptual differences between Visual Odometry and Supporting video for the public repository of ROS package cmr_lidarloop ( 2021, ... Using ORB SLAM2 from link with some modifications. This video provides some intuition around Pose Graph Optimization—a popular framework for solving the simultaneous ... Team 7 Mobile Robotics at University of Michigan EECS568/ROB530/NAVARCH568. Thanks to Jane Street for their support... Check out internships here: More links & stuff in full ...
Ever wondered how robots and autonomous systems navigate their environment with precision? This video dives into a critical ... Ever wondered how robots navigate complex environments and build accurate maps? This video dives deep into the crucial role ... Simulation of a robot driving around and observing landmarks (objects). When the robot observes a landmark for the second time, ... Ever wondered how robots navigate complex environments without getting lost or mapping inaccuracies? This video dives into ...