Media Summary: You might not believe me when I say this, but My master thesis project at Simón Bolívar University in Venezuela. Real time robot navigation using It's something we all have heard of, but its not the easiest thing to understand. Today we're talking about
Dynamic Potential Field Exploration - Detailed Analysis & Overview
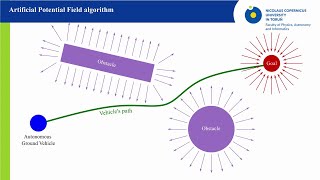
You might not believe me when I say this, but My master thesis project at Simón Bolívar University in Venezuela. Real time robot navigation using It's something we all have heard of, but its not the easiest thing to understand. Today we're talking about For my Guidance, Navigation and Control course. A brief presentation of the Predictive Artificial This work presents an integrated approach that combines trajectory optimization and Artificial
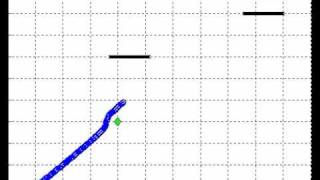
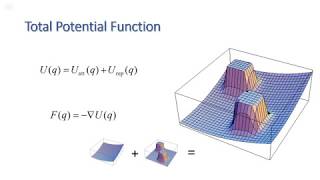
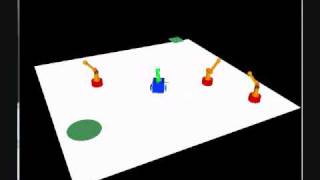
Results of our first pass at integrating artificial In this simulation 4 obstacles are placed side by side creating a wall. Each obstacle is represented as a Gaussian Dynamic Path Planning using Potential Field Method One of our first runs.... The robot is using an artificial