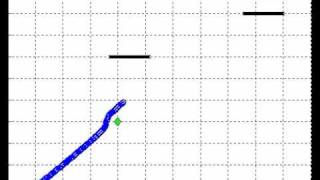
Media Summary: My master thesis project at Simón Bolívar University in Venezuela. Real time robot navigation Avoidance of hundreds of moving obstacles For my Guidance, Navigation and Control course.
Dynamic Potential Field Generation Using - Detailed Analysis & Overview
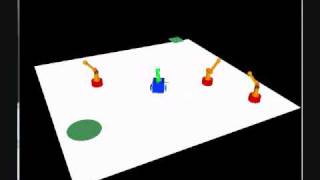
My master thesis project at Simón Bolívar University in Venezuela. Real time robot navigation Avoidance of hundreds of moving obstacles For my Guidance, Navigation and Control course. This work presents an integrated approach that combines trajectory optimization and Artificial In this simulation 4 obstacles are placed side by side creating a wall. Each obstacle is represented as a Gaussian robotics It takes a significant amount of time and energy to create these free video ...
Dynamic Path Planning using Potential Field Method Dynamic Path Replanning for the Parrot AR Drone Using a Potential Field Path Planner Collision free navgation implement on a youBot in V-REP enviroment In this video, a well-known motion planning method is introduced, known as Path planning using Artificial potential Fields in a Differential drive robot Velocity-Scaled Safe Artificial Potential Field for Mobile Robot Navigation in Dynamic Environments