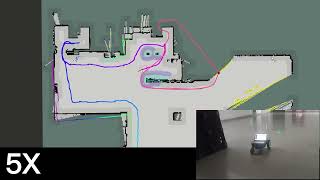
Media Summary: Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ... Hey everyone! I'm sharing my autonomous exploration implementation for our Autonomous Mobile This video explains the basics of SLAM (Simultaneous Localization and Mapping), how a LIDAR sensor works,
Frontier Based Robot Navigation For - Detailed Analysis & Overview
Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ... Hey everyone! I'm sharing my autonomous exploration implementation for our Autonomous Mobile This video explains the basics of SLAM (Simultaneous Localization and Mapping), how a LIDAR sensor works, Support on ROS Kinetic is a bit sketchy, problems with Odom. Kinetic will be supported fully in the coming months according to ... Heriot-Watt University School of Mathematical and Computer Sciences Master in John J. Leonard is Samuel C. Collins Professor of Mechanical and Ocean Engineering in the MIT Department of Mechanical ...
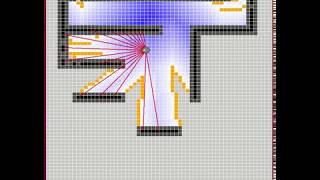
Simulation of Turtlebot Mapping using Frontier Based Exploration Using Bot Grid Simulator, we illustrate the Yamauchi algorithm where a single Understanding how humans leverage semantic knowledge to OutdoorNav is an outdoor autonomy software platform designed for vehicle developers, OEMs and















![[GaTech, ICRA 2024] VLFM: Vision-Language Frontier Maps for Zero-Shot Semantic Navigation](https://i.ytimg.com/vi/x5q5EkOfmWg/mqdefault.jpg)

