Media Summary: Speaker: Gonzalo Ferrer - Skoltech The task of navigating, that is, moving from one place to another in any kind of environment, ... We present a novel Deep Reinforcement Learning (DRL) based policy to compute This video presents a research project on PRM-Based Global Planning for
Mobile Robot Navigation In Dynamic - Detailed Analysis & Overview
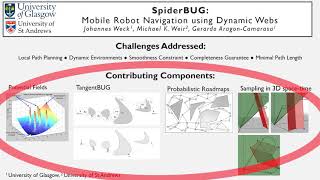
Speaker: Gonzalo Ferrer - Skoltech The task of navigating, that is, moving from one place to another in any kind of environment, ... We present a novel Deep Reinforcement Learning (DRL) based policy to compute This video presents a research project on PRM-Based Global Planning for Video Author: Johannes Weck Video Submission for ICRA 2021. Abstract: The problem addressed in this paper is that of an ... FZI and IRT Jules Verne have developed together the Human Aware Spot autonomously navigates a specified route through an office and lab facility. Before the test, the
Deep Reinforcement Learning has been successfully applied in various computer games. But it is still rarely used in real world ... In this video the problem of online trajectory optimization and cooperative collision avoidance is addressed when several ... Course Project - Mobile Robot Autonomous Navigation: dynamic environment Human-friendly robot navigation in dynamic environments