Media Summary: Speaker: Gonzalo Ferrer - Skoltech The task of navigating, that is, moving from one place to another in any kind of FZI and IRT Jules Verne have developed together the Human Aware Mobile By combining off-the-shelf sensors and sensor fusion techniques with a custom-built reinforcement learning AI algorithm, we are ...
Robot Navigation In Dynamic Environments - Detailed Analysis & Overview
Speaker: Gonzalo Ferrer - Skoltech The task of navigating, that is, moving from one place to another in any kind of FZI and IRT Jules Verne have developed together the Human Aware Mobile By combining off-the-shelf sensors and sensor fusion techniques with a custom-built reinforcement learning AI algorithm, we are ... Xuan Tung Truong and Trung Dung Ngo The More-Than-One Human-friendly robot navigation in dynamic environments Neural network from arena-rosnav ( which tries to avoid collisions against moving ...
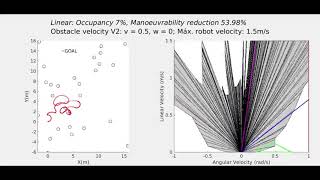
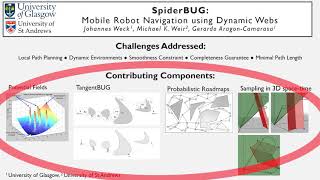
Video Author: Johannes Weck Video Submission for ICRA 2021. Abstract: The problem addressed in this paper is that of an ... This paper proposes a compositional framework of neural SDFs to solve Velocity-Scaled Safe Artificial Potential Field for Mobile Robot Navigation in Dynamic Environments Course Project - Mobile Robot Autonomous Navigation: dynamic environment We present a novel Deep Reinforcement Learning (DRL) based policy to compute 2020 IEEE 16th International Conference on Automation Science and Engineering (CASE), August 2020 Hong Kong.
Han, Ruihua, Shengduo Chen, and Qi Hao. "Cooperative Multi- Abstract: In this work, we present a learning-based pipeline to realise local