Media Summary: In this paper, we give a double twist to the problem of This is a video supplement to the book "Modern Robotics: Mechanics, Embedded System Class Project. Implement A*
Obstacle Aware Path Planning - Detailed Analysis & Overview
In this paper, we give a double twist to the problem of This is a video supplement to the book "Modern Robotics: Mechanics, Embedded System Class Project. Implement A* See the other videos in this series: This video ... This Demo is performed by partners in System Arch. Research Dept., R&D Div.. When our task environment changes, if this ... robotics It takes a significant amount of time and ...
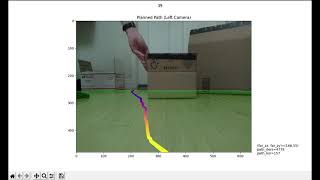
This is a complimentary video to the paper: Yakovlev K., Andreychuk A. Towards Time-Optimal Any-Angle ICRA 2018 Spotlight Video Interactive Session Thu AM Pod K.1 Authors: Perez-Higueras, Noe; Caballero, Fernando; Merino, Luis ... Stereo Camera Autonomous Navigation: Obstacle Avoidance & Path-Planning robotics It takes a significant amount of time and energy to create these free video ... Get instant access to MATLAB & Simulink books, guides, and course files to boost your skills! Get Access Now: ... Discover how drones navigate complex environments using the A* (A-star)
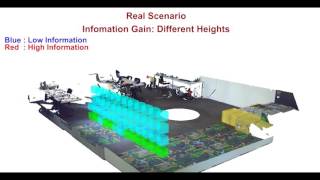
In this paper, we propose a new environment model for legged robots. The model stores information about the shape of the ... Code: Paper: Abstract: This paper presents PANTHER, ... ROS Implementation Robot: Husky Clearpath.






![[2021] Towards Time-Optimal Any-angle Path Planning With Dynamic Obstacles :: Demo](https://i.ytimg.com/vi/k245e3CMUO4/mqdefault.jpg)