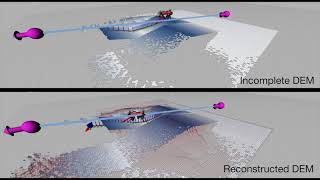
Media Summary: In this paper, we propose a new environment model for legged robots. The model stores information about the shape of the ... Sarah Keren is a professor in the Technion Faculty of Computer Science and the director of the Collaborative Artificial Intelligence ... Paper Abstract: Compared to wheeled vehicles, legged systems have a vast potential to traverse challenging
Terrain Aware Motion Planning For - Detailed Analysis & Overview
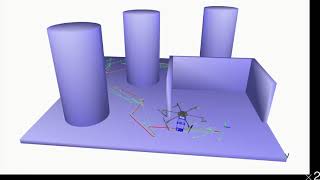
In this paper, we propose a new environment model for legged robots. The model stores information about the shape of the ... Sarah Keren is a professor in the Technion Faculty of Computer Science and the director of the Collaborative Artificial Intelligence ... Paper Abstract: Compared to wheeled vehicles, legged systems have a vast potential to traverse challenging This is a *re-recording* of my presentation at the American Physical Society's 2021 virtual March Meeting. Abstract: ... ICRA 2018 Spotlight Video Interactive Session Wed AM Pod G.1 Authors: Knobloch, Adrian; Vahrenkamp, Nikolaus; Waechter, ... We present a model-based optimization framework that optimizes base pose and footholds simultaneously. It can generate ...
Achieving efficient and uniform coverage in obstacle-laden unknown environments is essential for autonomous robots in cleaning, ... Southwest Research Institute developed a robotics simulation package using Drake, a simulation tool for robotics. We also ... Robotic mobility in microgravity is necessary to explore asteroids and to aid astronauts in space stations. However, dynamic ... See the other videos in this series: This video ... Multimedia attachment of the paper "STL-Based The video shows example result of an variant of RRT* implemented in vox_nav for
This work contributes a novel strategy towards risk- B. van den Berg, B. Brito, M. Alirezaei and J. Alonso-Mora, "Curvature Video of oral presentation at IROS 2023. Paper: arxiv.org/pdf/2309.06115.pdf Viedo: youtube.com/watch?v=BPfoun_vQ4I&t Code: ... Paper: Tognon M, Cataldi E, Tello Chavez H, Antonelli G, Cortés J, Franchi A. Control-